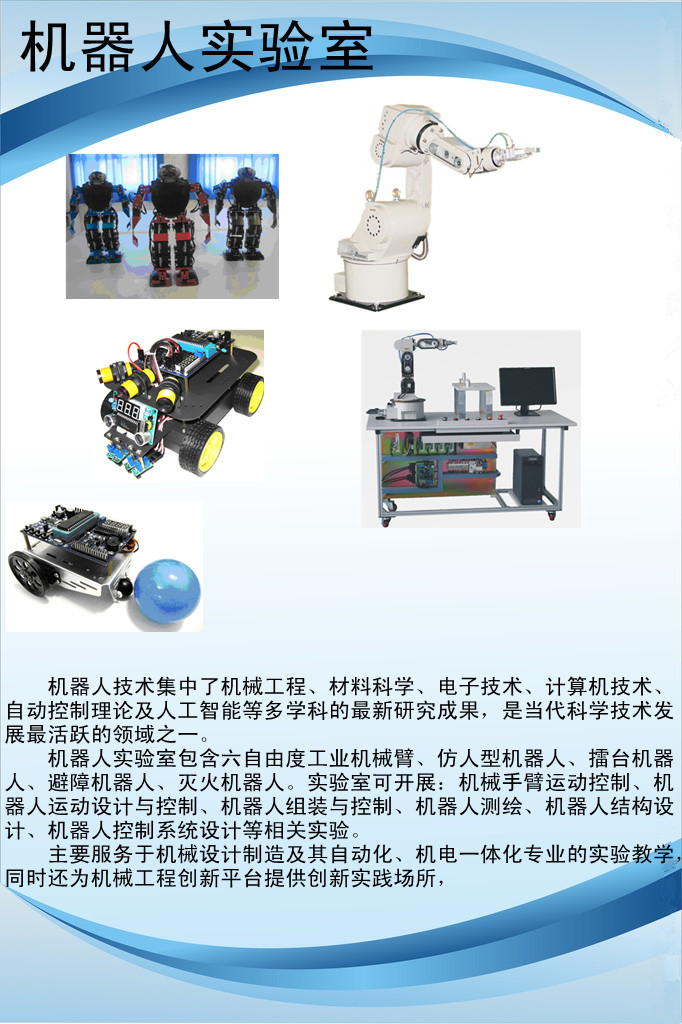
机器人是自动控制机械的俗称,包括一切模拟人类行为和思想及模拟其他生物的机械。该实验室设有六自由度机械手、跳舞机器人、六足机器人、救火机器人和避障机器人等涵盖各种功能的一系列现代机械。实验室中的所有机器人均可通过用户的人工编程实现指定动能的扩展和实现。
六自由度机械手:该装置可以实现机械结构在六个自由度上的运动,机械手前端的装置可以通过气动系统实现夹紧和放松,模拟了人类的手指夹取动作。
跳舞机器人:与曾在央视春晚上进行表演的跳舞机器人类似。该机器人的结构组成模拟了人类的躯干和四肢,其四肢的自由度决定了该机器人可以模拟人类关节的运动,从而使机器人呈现的动作更加生动逼真。
六足机器人:又叫蜘蛛机器人,是多足机器人的一种,与常见的轮式和履带式的机器人相比,多足机器人能够在更加崎岖的地面上实现平稳的行走,适合在更多不同地理情况的条件下工作。
避障机器人:该机械装置能够利用前置和侧面的红外传感器检测自身与前方或侧面的障碍物距离,并且根据自身所处的位置更改前进方向以达到躲避障碍物的功能。
救火机器人:该机器人的前部装有温度探头,能够比较准确地探测现场温度并根据相关数据确定火源位置,之后由灭火装置消除火源影响,从而达到成功灭火的目的。